Abstract
Value-based methods for reinforcement learning lack generally applicable ways to derive behavior from a value function. Many approaches involve approximate value iteration (e.g., -learning), and acting greedily with respect to the estimates with an arbitrary degree of entropy to ensure that the state-space is sufficiently explored. Behavior based on explicit greedification assumes that the values reflect those of \textit{some} policy, over which the greedy policy will be an improvement. However, value-iteration can produce value functions that do not correspond to \textit{any} policy. This is especially relevant in the function-approximation regime, when the true value function can’t be perfectly represented. In this work, we explore the use of \textit{inverse policy evaluation}, the process of solving for a likely policy given a value function, for deriving behavior from a value function. We provide theoretical and empirical results to show that inverse policy evaluation, combined with an approximate value iteration algorithm, is a feasible method for value-based control.

Research Fellow
I work on AI governance as a Research Fellow at GovAI and a PhD student at Mila.
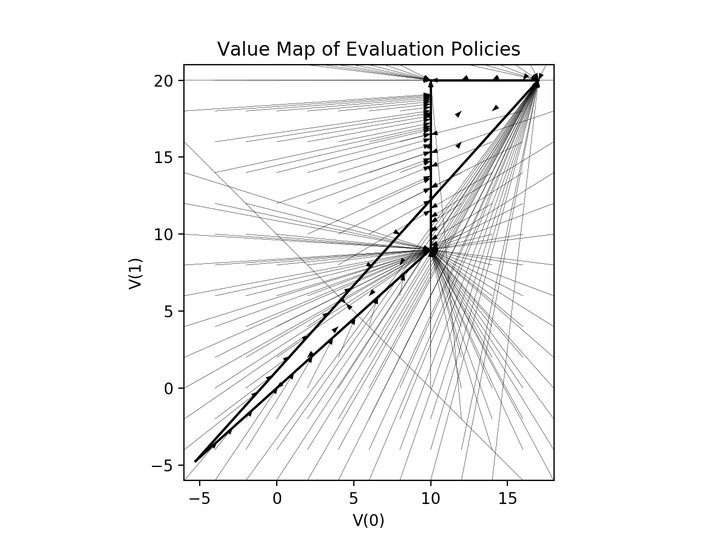 The IPE policy on Switch-Stay for various value function initializations.
The IPE policy on Switch-Stay for various value function initializations.